Příkaz Spline (Spline)
ZWCAD > Nápověda > Příkazy > Spline (Spline)
| Ikona | |
| Ribbon 2D: | Výchozí > Kresli > Spline, body vyhlazení |
| Panel nástojů: | Kresli > Body vyhlezení nebo Spline > Body vyhlazení, Řídící vrcholy |
| Nabídka: | Kresli > Spline > Body vyhlazení, Řídící vrcholy |
| Klávesnice: | Spline |
| Alias: | SPL |
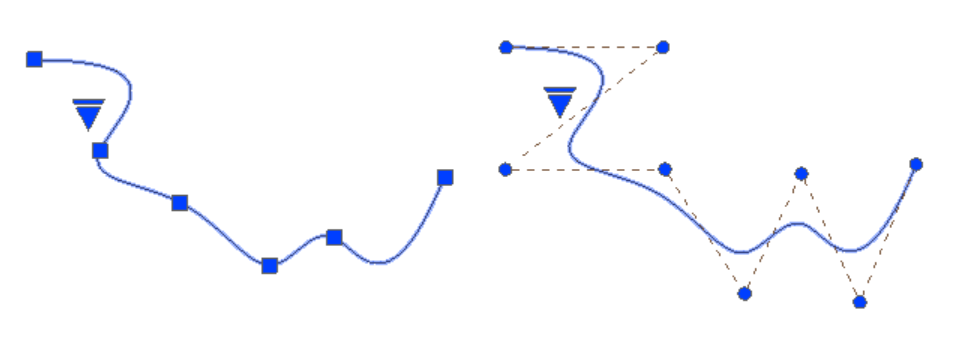
Příkaz tvoří hladké křivky, které procházejí, nebo se blíží k souboru daných kontrolních bodů, nebo jsou určené pomocí řídících vrcholů.
Spline je křivka typu NURBS, definovaná pomocí kontrolních bodů nebo řídicích vrcholů. Kontrolní body leží na spline, zatímco řídicí vrcholy určují kontrolní rámce, jejichž pomocí lze snadno upravovat tvar spline.
První bod
Zadejte první bod spline. Typ kontrolního bodu je určen nastavením tvorby spline.
Další bod
Zadávejte další body spline, dokud neukončíte příkaz stisknutím klávesy Enter.
Zpět
Funkce smaže poslední vytvořený bod.
Uzavři
Funkce vytvoří uzavřenou spline.
Tolerance vyhlazení (vhodná při použití metody přizpůsobení kontrolních bodů)
Funkce určuje, jak daleko od kontrolních bodů může křivka procházet. Hodnota tolerance se vztahuje na všechny body kromě počátečního a koncového bodu, kde je vždy 0. Nulová tolerance znamená, že spline bude procházet všemi body.
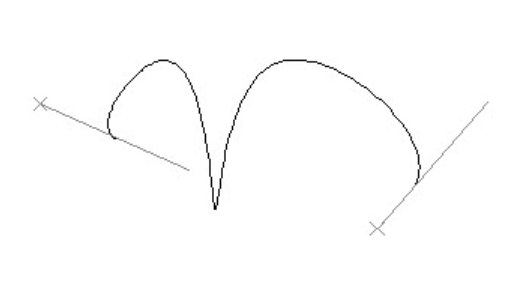
Počáteční tangenta (vhodná při použití metody přizpůsobení)
Zvolte bod, kterým určíte směr počáteční tangenty na spline.
Zadávejte další body spline, dokud neukončíte příkaz stisknutím klávesy Enter.
Zpět
Funkce smaže poslední vytvořený bod.
Uzavři
Funkce vytvoří uzavřenou spline.
Tolerance vyhlazení (vhodná při použití metody přizpůsobení kontrolních bodů)
Funkce určuje, jak daleko od kontrolních bodů může křivka procházet. Hodnota tolerance se vztahuje na všechny body kromě počátečního a koncového bodu, kde je vždy 0. Nulová tolerance znamená, že spline bude procházet všemi body.
Počáteční tangenta (vhodná při použití metody přizpůsobení)
Zvolte bod, kterým určíte směr počáteční tangenty na spline.
Koncová tangenta
Zvolte bod, kterým určíte směr koncové tangenty na spline.
Zvolte bod, kterým určíte směr koncové tangenty na spline.
Metoda
Určete metodu, jejíž pomocí chcete vytvořit spline. Metoda je určena pomocí hodnoty systémové proměnné SPLMETHOD.
Přizpůsobení
Pomocí funkce jsou určeny kontrolní body, přes které musí spline projít, aby vznikla B-spline třetího řádu. Pokud je hodnota tolerance vyšší než 0, spline bude v hranici zvolené tolerance v každém kontrolním bodě.
Řídicí vrcholy
Funkce určuje řídicí vrcholy, jejichž pomocí je definována spline. Při použití této metody lze vytvořit spline prvního až desátého řádu. Obvykle je účelnější pohybovat řídicími vrcholy, než kontrolními body.
Uzly (vhodné při použití metody přizpůsobení)
Určete parametrizaci uzlů. Jde o výpočetní metodu použitou pro určení přechodů mezi křivkami mezi kontrolními body spline. Hodnota parametrizace uzlů je uložena v systémové proměnné SPLKNOTS.
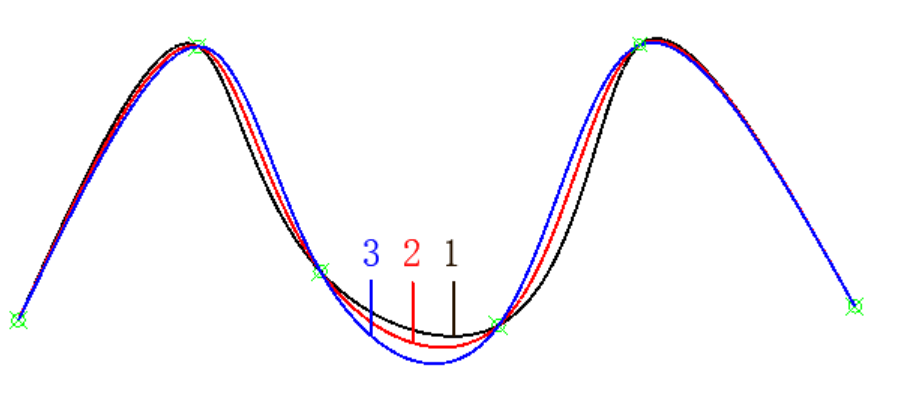
Hodnoty parametrizace použité u křivek 1, 2 a 3 jsou tětiva, odmocnina délky tětivy a jednotný. Obrázek ukazuje, že i při použití stejných kontrolních bodů je výsledný tvar spliny odlišný, pokud je použitá odlišná metoda parametrizace uzlů. Obecně lze říct, že algoritmus parametrizace uzlu používající odmocninu délky tětivy vede k jemnější spline.
Stupeň (vhodné pro metodu řídících vrcholů)
Funkce určí stupeň spliny. Tato volba umožňuje vytvořit spliny prvního až desátého stupně.
Objekt
Funkce převede vhodné/použitelné kvadratické nebo kubické 2D nebo 3D křivky na spliny. To, zda bude původní křivka zachována, určuje systémová proměnná DELOBJ.
Pomocí funkce jsou určeny kontrolní body, přes které musí spline projít, aby vznikla B-spline třetího řádu. Pokud je hodnota tolerance vyšší než 0, spline bude v hranici zvolené tolerance v každém kontrolním bodě.
Řídicí vrcholy
Funkce určuje řídicí vrcholy, jejichž pomocí je definována spline. Při použití této metody lze vytvořit spline prvního až desátého řádu. Obvykle je účelnější pohybovat řídicími vrcholy, než kontrolními body.
Uzly (vhodné při použití metody přizpůsobení)
Určete parametrizaci uzlů. Jde o výpočetní metodu použitou pro určení přechodů mezi křivkami mezi kontrolními body spline. Hodnota parametrizace uzlů je uložena v systémové proměnné SPLKNOTS.
Hodnoty parametrizace použité u křivek 1, 2 a 3 jsou tětiva, odmocnina délky tětivy a jednotný. Obrázek ukazuje, že i při použití stejných kontrolních bodů je výsledný tvar spliny odlišný, pokud je použitá odlišná metoda parametrizace uzlů. Obecně lze říct, že algoritmus parametrizace uzlu používající odmocninu délky tětivy vede k jemnější spline.
Tětiva (metoda délky tětivy)
Funkce rozloží uzly propojující jednotlivé komponenty křivky proporcionálně ke vzdálenosti mezi asociovanými dvojicemi kontrolních uzlů.
Odmocnina délky tětivy (dostředivá metoda)
Funkce rozloží uzly propojující jednotlivé komponenty křivky proporcionálně ke vzdálenosti mezi asociovanými dvojicemi kontrolních uzlů.
Jednotný (metoda jednotných vzdáleností)
Funkce rozloží uzly propojující jednotlivé komponenty křivky do stejných vzdáleností bez ohledu na vzdálenost kontrolních bodů.
Funkce rozloží uzly propojující jednotlivé komponenty křivky proporcionálně ke vzdálenosti mezi asociovanými dvojicemi kontrolních uzlů.
Odmocnina délky tětivy (dostředivá metoda)
Funkce rozloží uzly propojující jednotlivé komponenty křivky proporcionálně ke vzdálenosti mezi asociovanými dvojicemi kontrolních uzlů.
Jednotný (metoda jednotných vzdáleností)
Funkce rozloží uzly propojující jednotlivé komponenty křivky do stejných vzdáleností bez ohledu na vzdálenost kontrolních bodů.
Stupeň (vhodné pro metodu řídících vrcholů)
Funkce určí stupeň spliny. Tato volba umožňuje vytvořit spliny prvního až desátého stupně.
Objekt
Funkce převede vhodné/použitelné kvadratické nebo kubické 2D nebo 3D křivky na spliny. To, zda bude původní křivka zachována, určuje systémová proměnná DELOBJ.

zw@zw.cz | +420 732 174 118 | +420 737 398 182
Provozuje ARCH LAB, s.r.o., Wanklova 743/4, 779 00 Olomouc, IČ 28580591
ZWCAD 2026 | Verze | Ke stažení | Eshop | Obchodní podmínky
Použité ochranné známky jsou majetkem svých jednotlivých vlastníků.
![]()